
В США изобрели робота для поиска контрабанды
 Zakon.kz
Zakon.kz
Машина была представлена на международной конференции по интеллектуальным роботам и системам, которая в сентябре прошла в Чикаго.
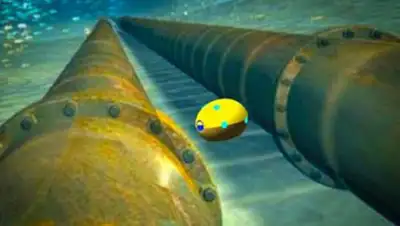
Ученые из Массачусетского технологического института (MIT) создали подводного робота овальной формы, величиной с футбольный мяч, способного скользить по днищу судов и искать контрабанду с помощью ультразвука. Машина была представлена на международной конференции по интеллектуальным роботам и системам, которая в сентябре прошла в Чикаго. Кратко об аппарате можно прочитать в пресс-релизе MIT.
Изначально спроектированный для поиска трещин в баках с водой ядерных реакторов робот был перенастроен на обследование кораблей, а именно малозаметных пустот в корпусе, куда контрабандисты имеют привычку прятать свои товары. Небольшой размер и особый механизм движения, не оставляющий следов на воде, позволяет камуфлировать роботов водорослями и мусором. В результате целые эскадры таких машин смогут обследовать заходящие в порт суда, не привлекая внимания контрабандистов (чтобы те не успели выбросить груз в море).
Роботы были напечатаны на 3D-принтере и стоят порядка 600 долларов. Половина машины (с плоским краем) защищена от воды: там находится электроника — схемы управления, аккумуляторы, связная антенна и блок инерциальных измерителей. В другой половине установлена движительная система: шесть насосов, выталкивающих воду по резиновым трубкам. Две трубки выходят с противоположного от плоской панели края — чтобы та могла упираться в обследуемую поверхность корабля. Остальные четыре выходят из двух боковых сторон, на противоположных концах длинной оси робота — они обеспечивают движение машины.
Из-за своей эллиптической формы робот всегда нестабилен — подобно реактивным истребителям, неустойчивость которых облегчает маневрирование, объясняет автор изобретения Самприти Бхаттачарья (Sampriti Bhattacharyya). Блок инерциальных измерителей состоит из трех акселерометров и трех гироскопов, способных рассчитать движение робота в любом направлении. Контрольный механизм регулирует скорость выкачивания воды из каждой трубки, что препятствует уклонению от заданного курса.
Литиевые аккумуляторы, установленные в опытном образце, работают всего сорок минут — но высокая скорость работы (около метра в секунду) дает роботу достаточно времени для инспекции нескольких небольших судов. По замыслу исследователей, такие машины должны работать сменяющими друг друга группами, периодически возвращаясь на перезарядку в порт.
К сожалению, ультразвуковые датчики работают только в условиях полного контакта с поверхностью — однако корпуса судов изобилуют неровностями (из-за ракушек, ржавчины и тому подобного). Для решения этой проблемы инженеры из MIT разрабатывают гидродинамические буферы нужной глубины, которые позволят роботу получать эхограммы даже без контакта поверхностей.



Следите за новостями zakon.kz в:


Поделиться
Если вы видите данное сообщение, значит возникли проблемы с работой системы комментариев. Возможно у вас отключен JavaScript



